4.4DH参数¶
DH参数全称为Denavit and Hartenberg Parameter,是指由Denavit和Hartenberg提出的,用于描述机器人(特别是机械臂)的姿态的参数。
具体来说,这些参数描述了机械臂各连杆之间的关系。下面以典型的多连杆机构,来讲述DH参数是如何定义的。
PPT
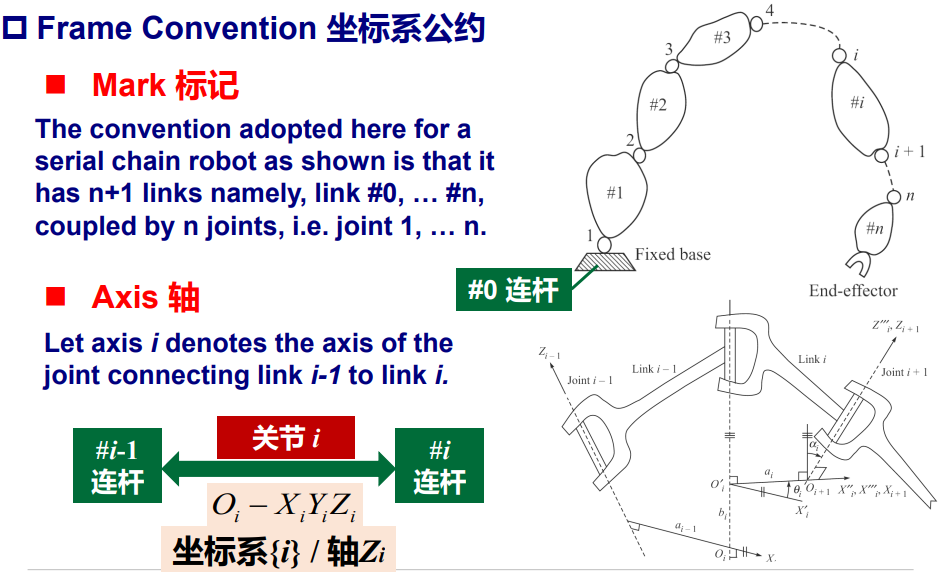
规定固定基座为连杆#0,与基座相连接的关节记作关节1,与关节1相连的下一个连杆记作连杆#2,以此类推。
显然,若有一关节记号为i,则该关节连接了连杆#i-1和连杆#i。
当机械臂中某部分绕着关节i旋转时,为了能使用数学语言描述其旋转前后的姿态,显然,我们需要一个矩阵,这个变换矩阵是一个关于关节i的旋转矩阵(假设其为旋转关节。对于其他类型关节,这样的描述也是相通的),那么,我们就需要一个坐标系,在这里例子中,这个坐标系的某一个轴显然通过该关节的轴。
机械臂上各坐标系的定义¶
对于任意一种关节,我们采用如下的定义来描述关于这个关节运动过程中的坐标系:
- 坐标系的\(Z\)轴通过关节的轴
- 坐标系的\(X\)轴在上一个关节\(Z_{i-1}\)与当前关节坐标系\(Z_i\)的公法线上,且由\(Z_{i-1}\)指向\(Z_{i}\),\(X\)轴和\(Z\)轴确定后,原点即确定
- 坐标系的\(Y\)轴由右手坐标系法则确定
此外,还有下列特殊情况:
- 对于关节
1,由于不存在关节0,故其坐标系只有\(Z\)轴是确定的,原点和\(X\)轴可以任意选取 - 当两个相邻坐标系的\(Z\)轴是平行的,其公法线不是唯一的
- 当两个相邻坐标系的\(Z\)轴相交,后者的\(X\)轴也是不唯一的
DH参数¶
对于任意一种关节,Denavit and Hartenberg认为有以下四种参数。对于特定的关节,某几个参数是固定的,称其为连杆参数:
| 符号 | 名称 | 定义 |
|---|---|---|
| \(b_i\) | 关节偏移 | \(X_i\)与\(X_{i+1}\)在\(Z_i\)上的距离 |
| \(\theta_i\) | 关节角 | 轴\(X_i\)与\(X_{i+1}\)的夹角 |
| \(a_i\) | 连杆长度 | 轴\(Z_i\)与轴\(Z_{i+1}\)在\(X_{i+1}\)上的距离 |
| \(\alpha_i\) | 转角 | 两\(Z\)轴之间的转角,\(Z_i\)和\(Z_{i+1}\)轴在垂直于\(X_{i+1}\)轴平面上的夹角 |
对于旋转关节,关节变量(JV,Joint Variable)为\(\theta_i\);对于移动关节,变量为\(b_i\)。
所讨论的关节i的变量都是对于连杆#i进行的,没有连杆#i,讨论变量就没有意义。
DH坐标变换¶
对上述讨论的DH参数,我们可以看作如下变换:
- 先沿着当前坐标系z轴正方向平移\(b_i\)
- 再沿着当前坐标系z轴旋转\(\theta_i\)
- 再沿着当前坐标系x轴正方向平移\(a_i\)
- 最后,沿着当前坐标系x轴旋转\(\alpha_i\)
上述过程中,由于1、2和3、4这两组中两个步骤的分别是关于同一个轴的平移和旋转,所以先后并没有区别,并且可以合并。故对于一个确定了DH参数的机器人的某部位,其坐标变换的齐次矩阵为
\[
T_i =
\left(
\begin{matrix}
\cos \theta_i & - \sin \theta_i & 0 & 0 \\
\sin \theta_i & \cos \theta_i & 0 & 0 \\
0 & 0 & 1 & b_i \\
0 & 0 & 0 & 1
\end{matrix}
\right) \left(\begin{matrix} 1 & 0 & 0 & a_i \\
0 & \cos \alpha_i & - \sin \alpha_i & 0 \\
0 & \sin \alpha_i & \cos \alpha_i & 0 \\
0 & 0 & 0 & 1\end{matrix}\right)
\]
则,对于整个机械臂,其变换为
\[ T = T_1 T_2 T_3 ... T_n \]